
您是否曾在庞大的地下停车场苦苦寻觅自己的爱车?是否在购物结束后,提着大包小包却完全忘记了停车位置?本文不仅将为您解析这些痛点的技术解决方案,更将深入探讨如何利用成熟的iBeacon蓝牙定位与摄像识别技术,打造一套体验丝滑的“找位-停车-寻车-离场”一体化导航系统。
一、 痛点解析:为什么“停车+寻车”是现代停场的体验黑洞?
1.“迷宫式”停车场:格局复杂、标识不清,入场后盲目寻找空位,效率低下。
2.“记忆失灵”症:传统方式依赖人脑记忆(如“停在B区C排”),在大型商场或机场停车场极易遗忘。
3.“最后一公里”难题:即使知道大致区域,也无法精确定位到车,仍需在区域内来回穿梭。
4.“出场前”的焦虑:找不到车就意味着耽误时间,影响用户体验,甚至可能导致拥堵。

二、 技术拆解:一体化导航系统的四大核心技术模块
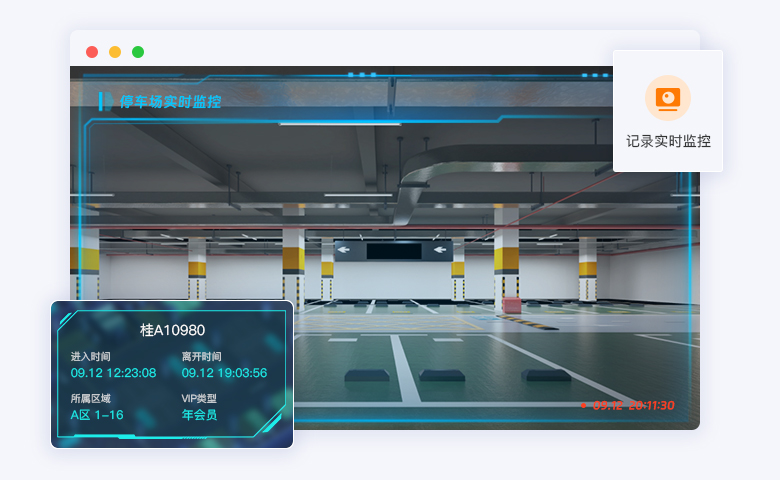
1.智能视觉基石:摄像头识别车牌与车位状态
技术选型:基于YOLO/SSD等深度学习模型的车牌识别(LPR)与车辆检测技术。
工作流:入口摄像头抓拍车牌绑定入场时间 → 顶置摄像头实时识别车位占用状态(有车/空位) → 数据上传至中心服务器,构建动态车位地图。
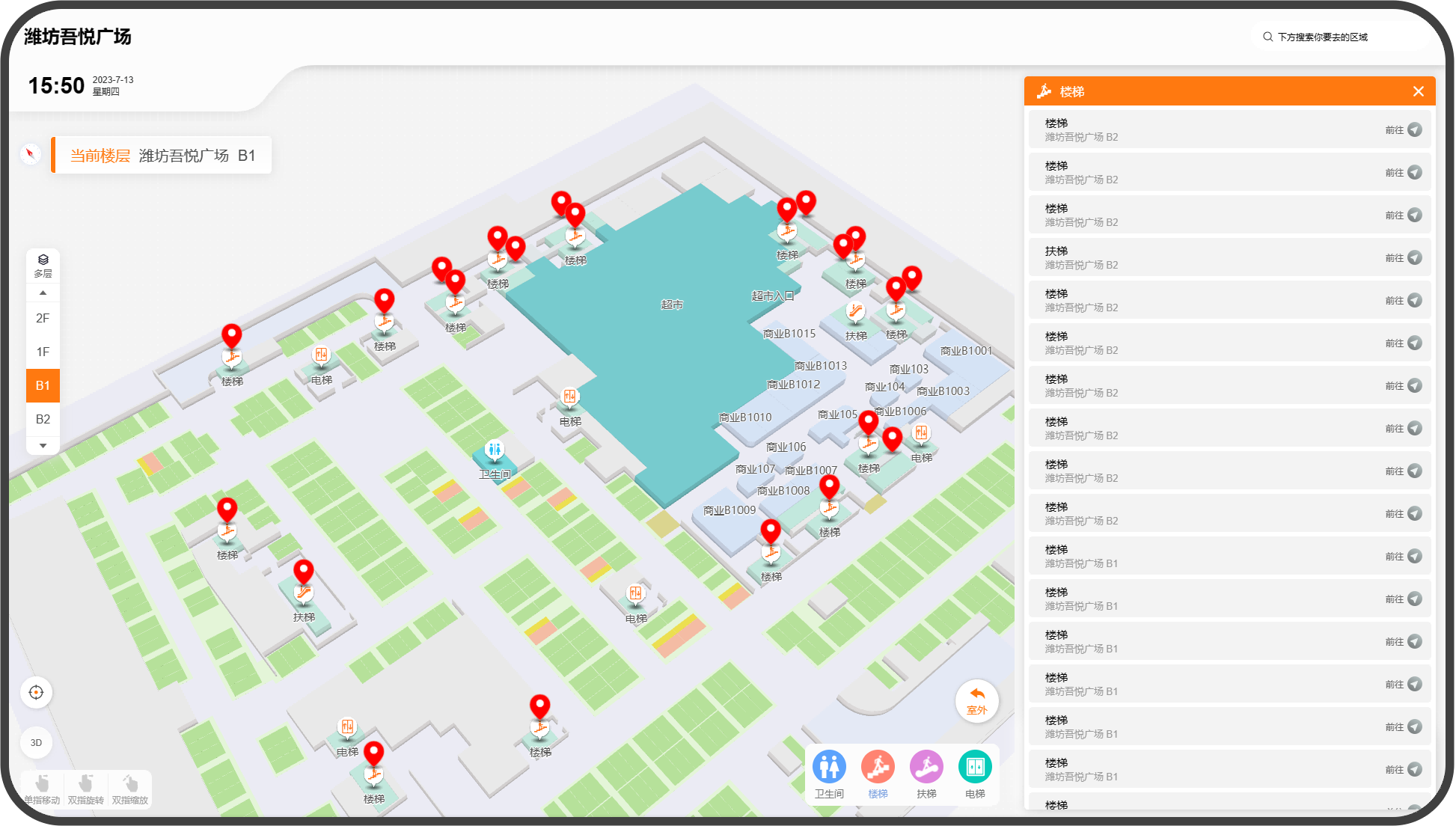
2.空间数字化:高精度电子地图呈现停车场布局
核心技术:采用Canvas/SVG或第三方地图引擎(如Leaflet)绘制停车场矢量地图。
关键数据:集成车位坐标、车道线、障碍物、出入口、电梯厅等POI信息,为路径规划提供数据基础。
动态渲染:实时接收服务器数据,在地图上动态更新空位状态(如用绿/红色标注)。
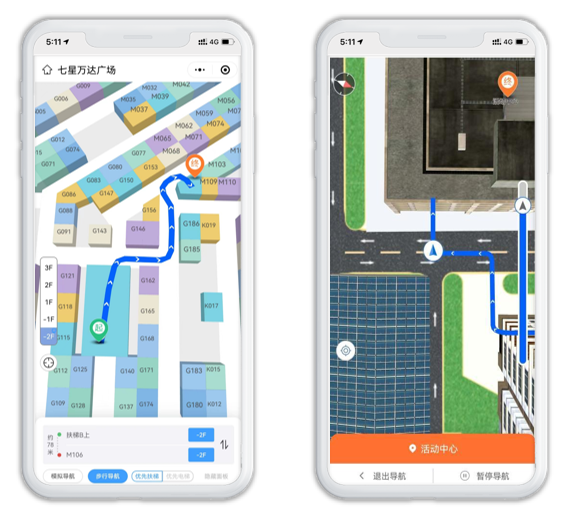
3.无缝定位导航:iBeacon蓝牙导引至具体车位
定位原理:在停车场关键路径节点部署iBeacon信标,持续广播UUID、Major、Minor和信号强度(RSSI)。
手机端定位:App通过扫描iBeacon信号,采用三角定位或指纹定位法,结合RSSI值滤波算法(如卡尔曼滤波)计算出用户实时位置。
路径规划:基于图搜索算法(如Dijkstra或A*算法),根据用户当前位置和系统分配/用户选择的目标车位,计算出最优步行路径,并在地图上进行AR或箭头导引。
4.反向寻车与智能离场:两种便捷寻车模式
模式一:输入车牌号寻车:用户输入车牌号,系统反向查询该车牌对应的最后停车车位,并直接规划从用户当前位置到该车位的路线。
模式二:记住车位号寻车:用户停车后,App自动记录车位号(如B205),寻车时只需选择该记录即可一键导航。
智能离场建议:系统根据用户寻车后的最终位置,智能推送距离最近的出口或电梯厅,并规划离场路径,完成体验闭环。

三、 效益分析:这套系统能带来什么价值?
1.用户体验提升:彻底解决“找车难”问题,提升顾客满意度和商业体形象。
2.管理效率提升:实现停车场数字化、可视化智慧管理,优化车流,减少拥堵。
3.降本增效:减少为寻车咨询而配备的人工服务成本。
4.数据价值:积累停车大数据,为运营决策(如高峰期疏导、车位定价)提供支持。
5.技术整合示范:展示了物联网(IoT)、计算机视觉(CV)和移动应用开发的完美结合,技术扩展性强,可轻松对接支付系统、会员系统等。
四、 结语与互动
综上所述,基于iBeacon和摄像识别技术构建的反向寻车系统,在技术上是完全可行且高效的。它不仅是几个技术的简单堆叠,更是一套以用户体验为中心的完整解决方案。


