
随着科技的进步和人们对于生活便利度的追求,导航系统已经成为了日常生活中不可或缺的一部分。而室内地图导航系统,作为导航系统的重要组成部分,也日益受到人们的关注。本文将深入剖析室内地图导航系统的相关技术,包括室内定位技术、室内地图构建技术、室内导航路径规划技术等,并探讨这些技术在现实中的应用情况。

一、室内定位技术
定位技术是室内地图导航系统的核心,它决定了导航系统的精度和实用性。目前,常见的室内定位技术主要包括蓝牙、WiFi、RFID等。
蓝牙定位:蓝牙定位主要通过测量信号强度来定位。蓝牙设备发射信号,多个接收设备接收信号并比较信号强度,通过三角定位或者指纹地图技术确定设备位置。这种方法的优点是成本低、设备体积小,但定位精度能满足导航需求,更精准的人员物品需搭配其他定位技术实现。
WiFi定位:WiFi定位通过测量信号传播时间来确定位置。WiFi设备发送信号,接收设备通过测量信号传播时间计算出距离,再结合多个设备的距离信息即可确定位置。这种方法的优点是精度高、成本低,但受环境影响较大。
RFID定位:RFID定位通过读取标签信息来确定位置。RFID标签部署在目标区域,当标签被阅读器扫描时,通过标签的信息确定位置。这种方法的优点是成本低、定位精度高,但需要预先部署标签。

二、室内地图构建技术
地图构建是室内地图导航系统的另一个重要环节,它需要将现实世界的空间信息转化为计算机可识别的地图数据。常见的地图构建方法包括实地测量和图像识别。
实地测量:实地测量需要人工测量空间信息,然后将这些信息转化为地图数据。这种方法精度高,但工作量大、成本高。
图像识别:图像识别通过计算机视觉技术自动从图像中提取空间信息,然后转化为地图数据。这种方法效率高、成本低,但容易受到光照、视角等因素的影响。
图纸自动转化:这是一种新型技术,目前已知维小帮导航系统的后台编辑器可以满足,实现上传CAD图纸自动识别生成电子地图,这种方法可以解决光照等现实因素影响,但对于图纸有一定要求。

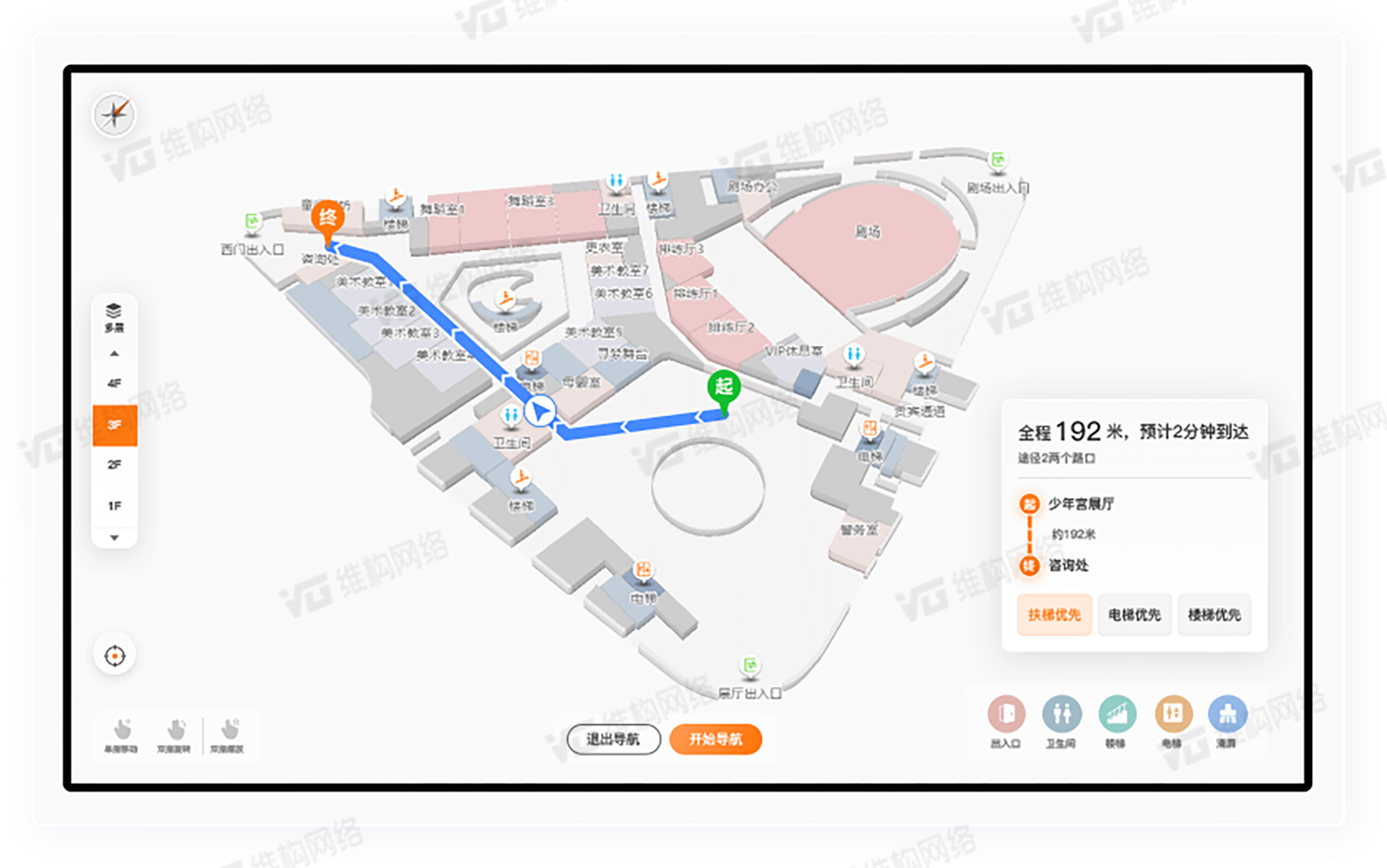
三、室内导航路径规划技术
路径规划是室内地图导航系统的另一个关键功能,它需要根据用户的位置和目标位置,自动规划一条最优路径。常见的路径规划算法包括Dijkstra算法、A*算法等。
Dijkstra算法:Dijkstra算法是一种基于权重的最短路径算法,适用于权值非负的图。它的优点是简单、易于实现,但计算量大,不适用于大规模的图。
A算法:A算法是一种启发式搜索算法,它在Dijkstra算法的基础上引入了启发函数来减少搜索范围。A*算法的优点是搜索效率高、适用范围广,但需要预先知道地图信息。
下一篇:浅析室内外导航一体化技术如何实现


